






HT-GYRO-210
资料下载 
主要指标
|
序号 |
参数 |
HT-GYRO- 210-100 |
HT-GYRO- 210-400 |
HT-GYRO- 210-500 |
HT-GYRO- 210-2000 |
HT-GYRO- 210-4000 |
HT-GYRO- 210-8000 |
单位 |
|
1 |
量程 |
150 |
400 |
500 |
2000 |
4000 |
8000 |
deg/s |
|
2 |
零偏稳定性 |
<0.02 |
<0.3 |
<0.3 |
<1 |
<2 |
<5 |
deg/hr |
|
3 |
零偏重复性 (1σ ) |
<0.1 |
<1 |
<1 |
<3 |
<5 |
<5 |
deg/hr |
|
4 |
角随机游走 |
<0.005 |
<0.125 |
<0.15 |
<0.3 |
<0.5 |
<0.8 |
°/ √h |
|
5 |
标度因子重复性 (1σ ) |
<50 |
<100 |
<50 |
<10 |
<10 |
<10 |
ppm |
|
6 |
带宽 (-3dB)) |
100 |
300 |
250 |
200 |
200 |
200 |
Hz |
|
接口特性 |
|
|
数据更新率 |
1200Hz |
|
启动时间 |
<300ms |
|
数据接口 |
RS422 |
|
波特率 |
921.6Kbps |
|
物理特性 |
|
|
工作温度 |
-40℃-+80℃ |
|
存储温度 |
-50℃-+85℃ |
|
尺寸 |
38.6*44.8*21.5mm |
|
重量 |
65g |
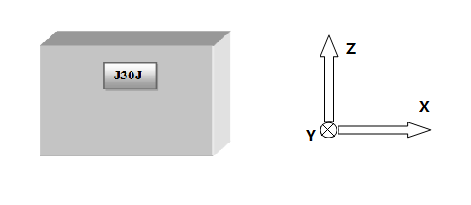
坐标轴定义

输出数据格式
|
RS422 Protocol:Baud=921.6K, no parity, data=8 bits, stop=1; |
|||
|
Byte offset |
Name |
description |
Size[bit] |
|
0 |
header |
0xC0C0 |
16 |
|
2 |
Angle rate |
float (deg/s) |
32 |
|
6 |
Angle rate |
float (deg/s) |
32 |
|
10 |
Angle rate |
float (deg/s) |
32 |
|
14 |
0x00000000 |
|
32 |
|
18 |
0x00000000 |
|
32 |
|
22 |
0x00000000 |
|
32 |
|
26 |
Temperature / BIT |
Integer LSB 0.01 |
16 |
|
28 |
Packet counter |
uint8 |
8 |
|
29 |
0x00 |
|
8 |
|
30 |
CRC16 |
CRC-CCITT: Bytes 2-29 |
16 |
接线定义
|
No. |
名称 |
I/O |
描述 |
|
1 |
TX- |
O |
Line Tx- RS422 Level |
|
2 |
RX- |
I |
Line Rx- RS422 Level |
|
9 |
Tx+ |
O |
Line Tx- RS422 Level |
|
10 |
Rx+ |
I |
Line Rx+ RS422 Level |
|
8 |
VSUP |
I |
Power supply |
|
15 |
GND |
|
Power ground |
|
3,4,5,6 |
|
|
Factory use. No access to any level |
|
7,11,12, 13,14 |
|
|
NC |
产品特点
1.高精度、小体积、长期稳定性。
2.全温区补偿。
3.承受冲击震动能力强。
4.非线性校正及交叉耦合校正。
5.用户通过串口指令可再次设定排除地球自转因素的陀螺零位。
6.可选单,双,三轴.
HT-GYRO-210是一款小体积、高精度的MEMS惯性测量单元,内部集成了三轴高精度MEMS陀螺仪产品出厂前进行全温温度补偿,保证其在复杂温度环境下具有稳定表现,广泛应用于天线稳定系统、平台控制系统、智能搬运机器人(AGV)、自主式水下航行器(AUV)、工业设备、测量/地图、稳定平台、交通、无人驾驶航空器(UAV)、无人驾驶地面车辆(UGV)等。

